
The landscape of robotics is undergoing a transformative shift, thanks to groundbreaking research from the German Aerospace Center’s Institute of Robotics and Mechatronics. Their ingenious integration of traditional internal force-torque sensors with cutting-edge machine-learning algorithms presents a compelling alternative to the conventional notion of artificial skin in machines. For ages, mimicking human senses has centered around complex simulations of physical attributes, but this innovation highlights a more elegant solution that could revolutionize how robots perceive their environment.
Reimagining the Sense of Touch
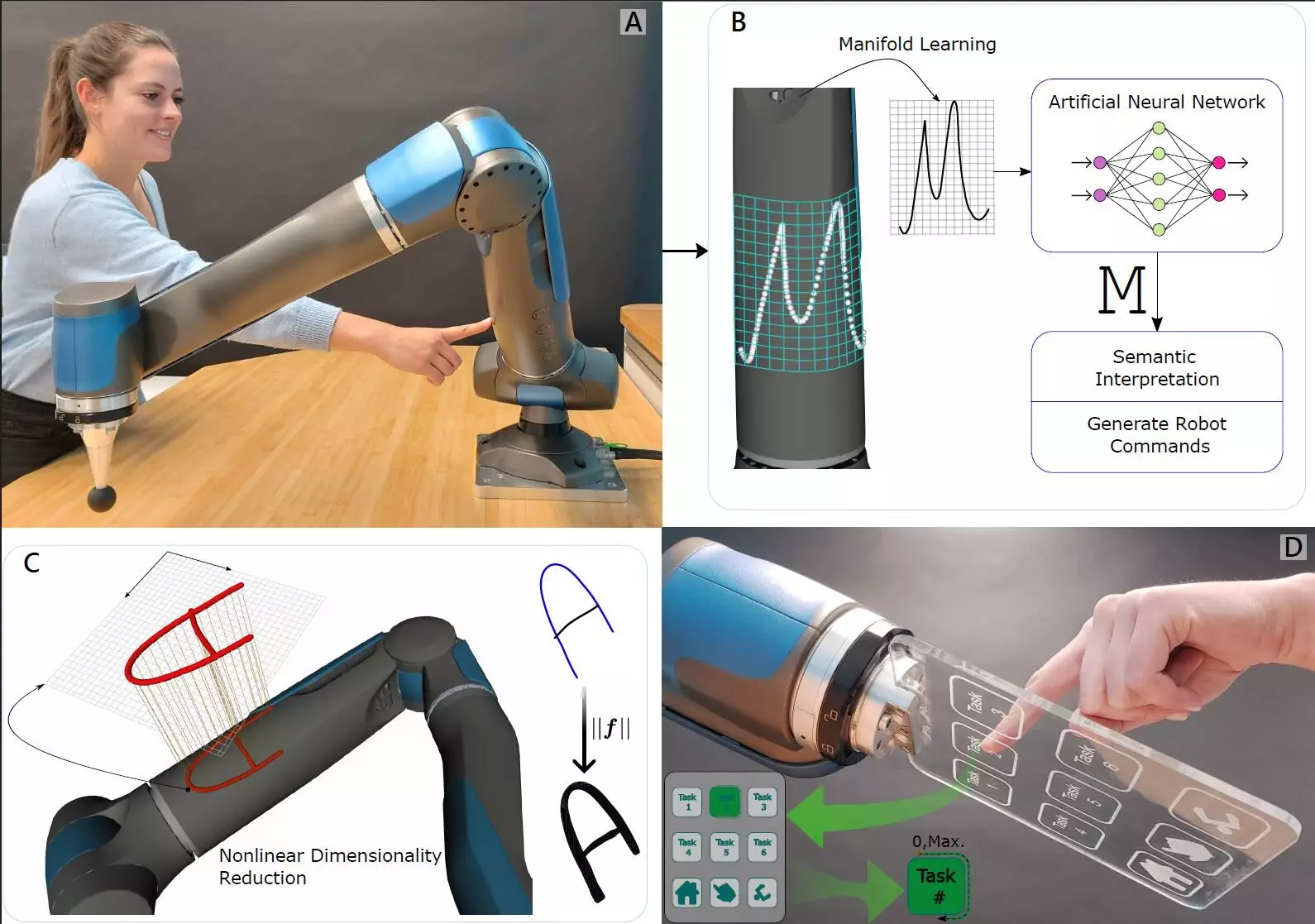
Touch, as experienced by living beings, is far from a one-dimensional interaction. It consists of a rich tapestry of sensations, such as texture and temperature, complemented by the awareness of physical contact from other entities. The research team sought to emulate this complex interaction, particularly the sensation of being touched, in robotic constructs. By equipping robotic arms with advanced internal force-torque sensors located strategically at the joints, researchers managed to replicate the subtlety of tactile sensations without the cumbersome addition of artificial skin.
The true genius of this research lies in its dual approach. While the sensors grasp the physical pressures applied from multiple angles, the machine-learning algorithms interpret these varied stimuli. This synthesis of hardware and software enables the robotic arm to discern between different types of touches, effectively allowing the machine to “feel” its surroundings similarly to how humans do. Such an approach showcases an elegant simplicity that could redefine robotic interactions, making them more intuitive and responsive.
The Mechanics Behind Sensory Integration
Central to this innovative approach is the understanding of torque— the force that causes rotation around a pivot. When pressure is applied to an area, the resulting torque can provide valuable feedback that is crucial for interpreting touch. For example, if a robot’s arm experiences pressure from a specific direction, the sensors capture this change and relay the information to the integrated machine-learning system. This technology not only tracks the point of contact but also offers insight into the intensity and type of touch, drastically enhancing human-robot communication.
One striking demonstration of this newfound capability involves the robot accurately identifying and responding to numbers pressed against its arm, showcasing a level of precision previously regarded as unattainable. This capability has profound implications for the future of robotics. It opens doors to new forms of interaction in both industrial settings, where robots and humans must collaborate closely, and in consumer-facing applications where personable robots could operate with heightened sensitivity.
A Bright Future for Human-Robot Interaction
In practical terms, the research illuminates a pathway toward safer and more effective human-robot collaborations. Robots equipped with this sensory technology could adapt in real-time to human touch, making them significantly more versatile in environments that necessitate constant human interaction. The implications of this research could lead to substantial advancements in various industries, from manufacturing to healthcare, and potentially reshape societal perceptions of robotic companions.
Robots have often been seen as cold, mechanical entities lacking the nuanced capabilities that characterize human interaction. However, the strides taken by the Institute of Robotics and Mechatronics signify a profound shift toward machines that not only respond to commands but can also engage in more human-like ways. This reimagined approach to touch sensitivity transcends mere technological advancement; it suggests a future where humans and robots coexist and collaborate in ways previously constrained to the realms of science fiction.
Leave a Reply
You must be logged in to post a comment.