
In our day-to-day lives, grabbing a book from a shelf appears to be a simple, almost instinctual act. However, behind this seemingly trivial task lies a sophisticated interplay of cognitive processes that humans effortlessly navigate—complex motion planning. This intricate choreography, mastered by the human brain, involves not just the physical action of reaching out but also the ability to assess and move around various obstacles, whether they are nearby books or other assorted items. For roboticists, however, replicating this fluid human-like behavior presents a daunting challenge. Motion planning—enabling a robot to retrieve an item without colliding with its surroundings—has proven to be an arduous task requiring substantial computational resources and time.
Conventional motion planning approaches often falter in dynamic or unstructured environments. Murtaza Dalal, a doctoral student at Carnegie Mellon University’s Robotics Institute (RI), highlights a critical shortcoming of existing algorithms: they are typically slow because they perform countless collision checks, leading to lengthy computation times that hinder real-time responsiveness. This makes adapting to unknown situations particularly challenging for robots. Unlike humans, who can react instinctively based on past experiences, traditional robots require an exhaustive understanding of the environment before they can act.
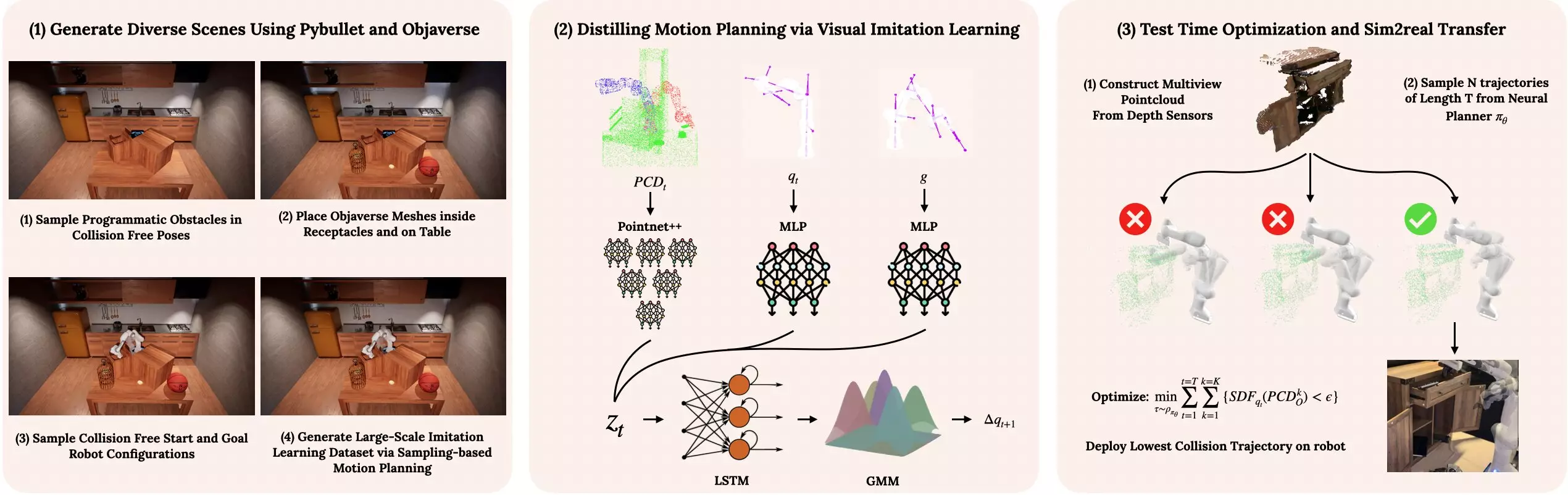
In light of these challenges, the RI team has pioneered a groundbreaking solution known as Neural Motion Planning (NMP). This innovative, data-driven approach harnesses the power of artificial intelligence to enhance the adaptability of robots in new and unpredictable household environments, including kitchens and living rooms. By streamlining motion planning through single, multipurpose AI models, NMP facilitates robots’ ability to navigate diverse settings without prior detailed knowledge of their surroundings. This advancement reflects the way humans learn and adapt over time—from initial slow and cautious movements to more assured, rapid actions as they gain experience.
One of the core principles behind Neural Motion Planning is the modeling of diverse environments through extensive simulations. Researchers created millions of scenarios that replicate household setups, guiding the robots to maneuver around not just typical obstacles like cabinets and microwaves, but also unpredictable elements such as pets or random clutter. This training process allows robots to develop proficiency in reactive motion planning, refining their skills in a variety of settings.
Moreover, the essence of NMP lies in cultivating a flexibility that mimics human adaptability. By distilling the training data into a generalist policy, the model can apply learned skills to new situations that it has not specifically encountered before. As Deepak Pathak, an assistant professor in the RI, points out, although there have been substantial advancements in large-scale learning for technologies like vision and natural language processing, robotics has lagged behind—until now.
The effectiveness of Neural Motion Planning has been validated through practical experiments utilizing robotic arms in laboratory settings. By feeding these systems a 3D representation of their initial context via depth cameras and setting specific target positions, the robots could employ the NMP framework to smoothly navigate to their goals. Astoundingly, these robotic arms exhibited the capability to deftly navigate an array of household obstacles—everything from furniture to doorways—demonstrating the potential for practical applications in real-world scenarios.
As Jiahui Yang, a master’s student at RI, noted, the experience of observing a single model successfully maneuver through a myriad of complex environments was both thrilling and revealing of the future potential embedded in this research. This capability not only underscores the significant strides being made in robotic motion planning but also holds promise for how autonomous systems could integrate into our homes and daily tasks.
Looking forward, Neural Motion Planning signifies a transformative leap in robotic capabilities. By bridging the gap between human-like task execution and the computational rigor of robotic design, this research may pave the way for smarter, more efficient robots. Future advancements will likely continue to refine these models, enabling even greater levels of adaptability and efficiency in an expanding range of environments. Ultimately, as humans increasingly integrate robotics into various aspects of life, solutions like NMP represent a vital stepping stone in creating systems capable of performing complex tasks autonomously, making the dream of versatile robotic assistants ever closer to reality.
Leave a Reply
You must be logged in to post a comment.