
The field of robotics has seen significant advancements in recent years, particularly in the development of robotic grippers that can manipulate various objects. Many of these grippers are designed to mimic human hands in order to effectively tackle complex object manipulation tasks. However, some of these grippers rely on advanced mechanisms and intricate programming tools, making them impractical for large-scale deployment due to their cost and energy consumption.
Researchers at Purdue University and MIT have recently introduced a simpler yet equally effective robotic gripper in a paper posted to the arXiv preprint server. This gripper, with only 5 degrees of freedom, is able to perform intricate in-hand manipulation tasks while maintaining ease of control through programming tools. By combining a gripper base with two fingers and a vision-based tactile sensor, the research team aimed to bridge the gap between high DOF dexterous hands and single DOF grippers.
The newly developed gripper consists of two fingers attached to a gripper base, with each finger equipped with a linear actuator and a rotational servo motor. This design allows for a total of 5 degrees of freedom, enabling the gripper to achieve human-like in-hand manipulations. Additionally, a GelSight mini vision-based tactile sensor mounted on one of the fingers provides valuable sensory data about the grasped object’s geometry, orientation, and grip force.
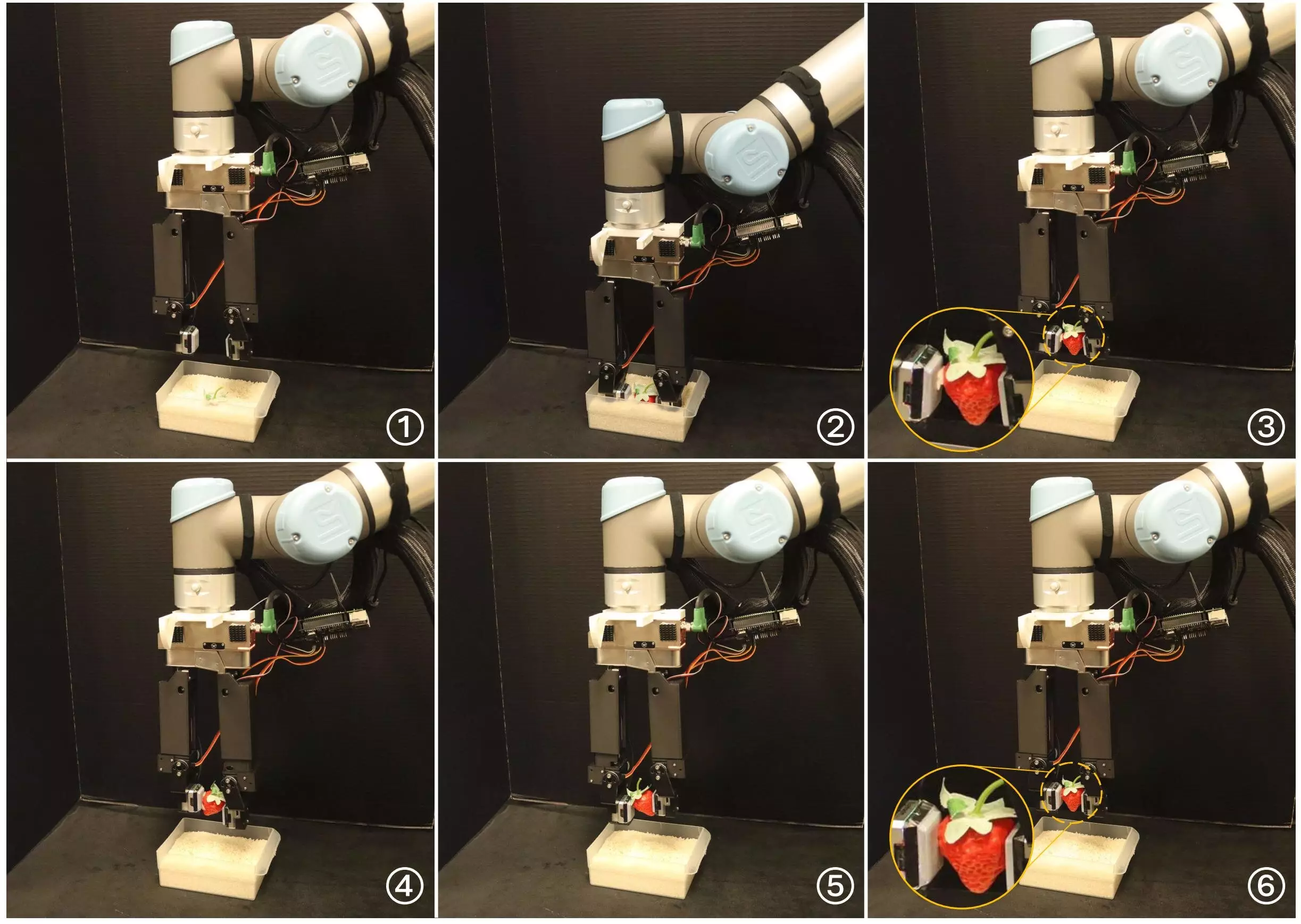
The key feature of this gripper is its ability to combine ease of control with high dexterity during in-hand manipulation tasks. In initial real-world experiments, the gripper successfully completed singulation and scooping tasks, surpassing the basic manipulation skills of simpler grippers with fewer degrees of freedom. This paves the way for the development of more cost-effective and energy-efficient robotic solutions that are easier to implement and maintain.
The research team plans to further develop the tactile gripper for more challenging manipulation tasks that are currently beyond the capabilities of other robotic grippers. This innovation not only opens up new possibilities for intricate object manipulation but also inspires the design of similar robotic systems that are both efficient and cost-effective. By simplifying the design and control of robotic grippers, researchers aim to revolutionize the field of robotics and create more practical solutions for real-world applications.
Leave a Reply
You must be logged in to post a comment.