
The field of robotics has seen significant advancements in recent years, especially in the area of imitation learning. One of the promising methods to teach robots how to complete everyday tasks is through the use of detailed human demonstrations. These demonstrations are crucial in providing the data necessary to reproduce specific movements using robotic systems. Traditional teleoperation systems have struggled to effectively process and reproduce the complex and coordinated movements performed by humans. However, recent developments by researchers at the University of California, San Diego have introduced a new teleoperation system called Bunny-VisionPro, which aims to revolutionize the way robots are taught to complete tasks.
The Development of Bunny-VisionPro System
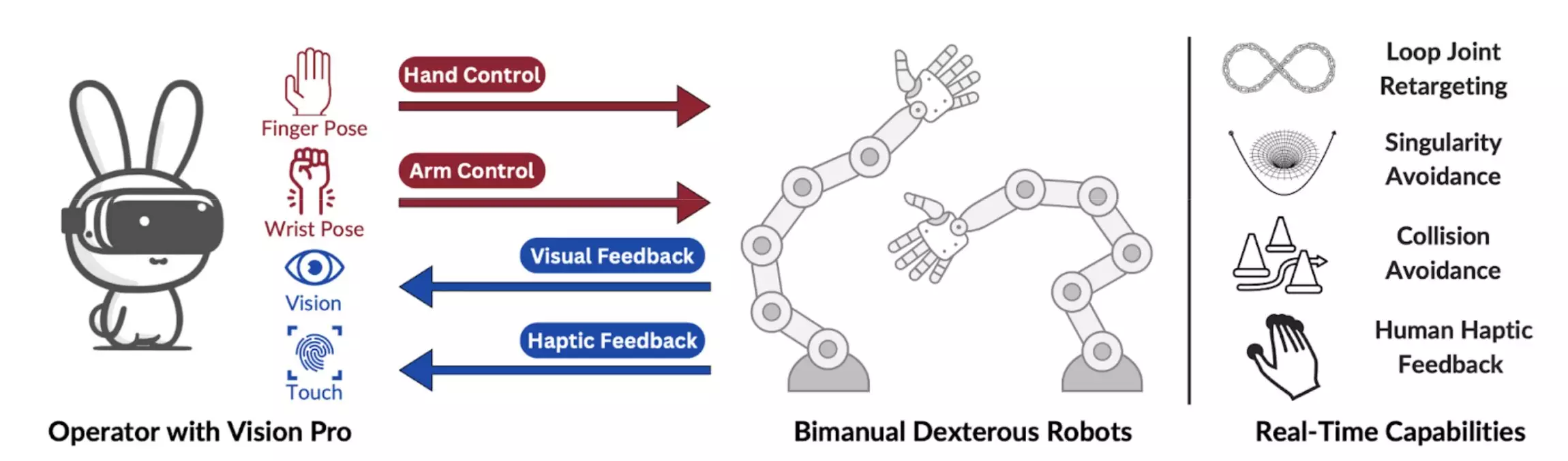
The primary objective of the Bunny-VisionPro system is to create a general teleoperation system that can easily adapt to different types of robots and tasks. This system is designed to simplify the collection of demonstrations needed to train robotics control algorithms. Bunny-VisionPro enables the teleoperation of a robotic system to complete bimanual dexterous manipulation tasks in real-time. This system allows human operators to control dual robot arms and multi-fingered hands, making the collection of demonstration data as intuitive and immersive as playing a game in virtual reality.
The Bunny-VisionPro system consists of three key components: an arm motion control module, a hand and motion retargeting module, and a haptic feedback module. The arm motion control module handles singularity and collision issues by retargeting the human wrist pose to the robot’s end-effector pose. The hand and motion retargeting module maps human hand poses to robot hand poses, including support for loop-joint structures. Finally, the haptic feedback module transfers robot tactile sensing to human haptic feedback through algorithmic and hardware design.
Advantages of Bunny-VisionPro System
One of the primary advantages of the Bunny-VisionPro system is its ability to enable safe control of a bimanual robotic system in real-time. Unlike previous solutions, Bunny-VisionPro integrates haptic and visual feedback, making the teleoperation experience more immersive for human users. This system effectively balances safety and performance by enabling control of robot arms and multi-fingered hands with minimal delay, while also incorporating collision avoidance and singularity handling. These features are crucial for working reliably in real-world robotic applications.
The recent work by researchers at the University of California, San Diego could greatly simplify the use of teleoperation for collecting demonstrations in imitation learning frameworks. Bunny-VisionPro has the potential to be deployed in various robotics labs worldwide and could inspire the development of similar immersive robotic teleoperation systems. Future studies aim to enhance manipulation capabilities by leveraging the robot’s tactile information for better precision and adaptability. The development of advanced teleoperation systems like Bunny-VisionPro is paving the way for more efficient and reliable robotic systems in the future.
Leave a Reply
You must be logged in to post a comment.