
Robots are becoming increasingly prevalent in our society, and in order to effectively assist humans in daily tasks across a variety of settings, they must have the ability to manipulate objects with dexterity. The development of cost-effective robotic grippers or hand-like systems is crucial in enabling robots to manipulate objects effectively. Recently, a team of researchers from Improbable AI Lab and Massachusetts Institute of Technology (MIT) have designed a new two-finger robotic gripper aimed at enhancing everyday manipulation tasks.
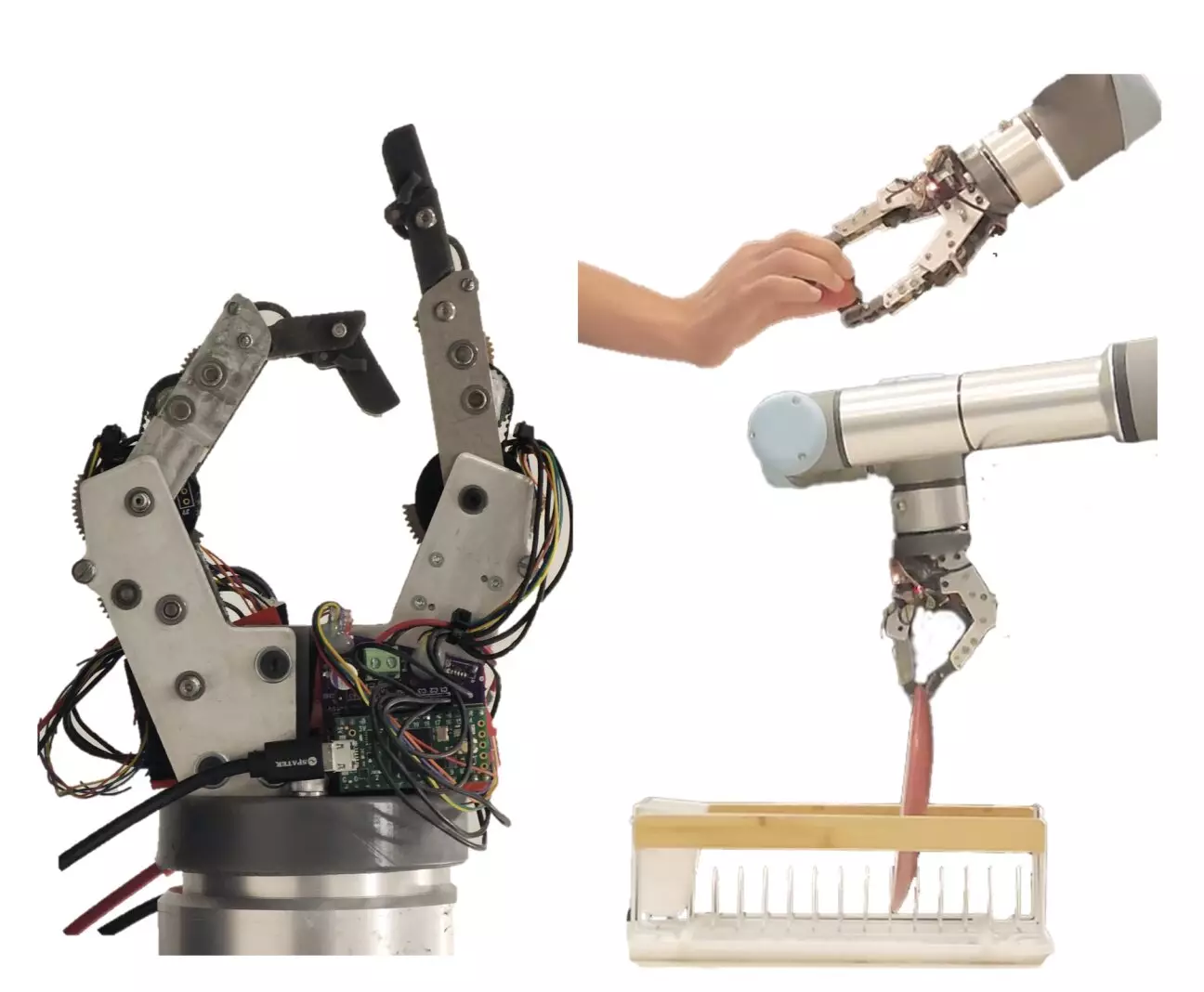
The robotic gripper developed by the researchers consists of a structure with two robotic fingers that closely resemble human fingers in terms of size and shape. These fingers are designed to bend and grasp objects securely, allowing the robot to pick up objects of various shapes and textures and place them in specific locations. The team’s focus was on creating a gripper capable of handling simple everyday tasks rather than complex manual operations. The finger design is based on series-elastic actuation, and the researchers have named their creation the “everyday finger.”
While the initial gripper created by the team only has 2 degrees of freedom (DoF) due to the limitations of palm size, the researchers are optimistic about adding more fingers in the future. By increasing the DoF, the gripper’s capabilities could be enhanced, allowing for more complex tasks to be carried out. The team believes that a three-finger or even a four-finger hand is possible in subsequent iterations, with potential for a full five-finger hand once more advanced actuators become available.
To evaluate the performance of their two-finger gripper, the researchers conducted a series of real-world experiments. These experiments assessed the speed, compliance, and force exerted by the gripper while completing basic pick-and-place tasks. The team tested the gripper on tasks such as arranging dishes, picking up thin objects like paper, and handling delicate items like strawberries. The results of the experiments were promising, with the gripper successfully completing all of the tasks tested.
Although the tasks tested were basic, they represent activities that humans engage in on a daily basis. The successful performance of the gripper in these tasks bodes well for the development of household robots that can assist with everyday chores. As the researchers continue to refine the gripper’s design and evaluate its performance on a wider range of tasks, the potential for integrating robotic assistance into households grows.
The development of innovative robotic grippers like the two-finger system created by the researchers at Improbable AI Lab and MIT is crucial for advancing the capabilities of robots in performing everyday tasks. By focusing on simplicity, dexterity, and efficiency, these grippers have the potential to revolutionize the field of robotics and pave the way for more interactive and practical robotic systems in various settings.
Leave a Reply
You must be logged in to post a comment.